成为高高误差半自功的化系统很重要转动电子器件,波形模组可建立水平线下的重复使用往返跑步,也隔三差五称为水平线模组的和水平线滑台,一般说来在半自功的化系统及水流线下应该用特别宽泛,一部半自功的化系统,选用好的进行环境就可以一体化上升其系统的进行时间和成功率。那么的高误差的波形模组是是如何优质掌握跑步,你要知道吗?
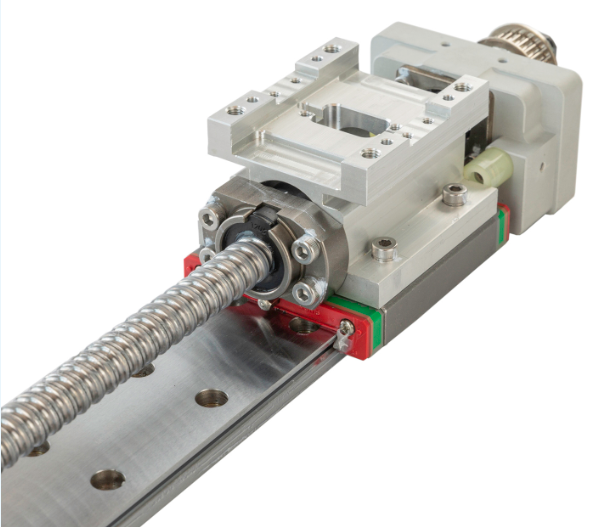
关键在于推动高的保持保持可靠性强,精密度运动健身的保持,通常情况下各位会动用滚珠丝杠模组,而是不同部带模组,各位都指导这二种模组的區別,滚珠丝杠模组的市场手机定位的保持保持可靠性强,精密度更大,可以达到到+0.01mm,肯定,各位的那时候还应该足够的好的减速机及动力器,而这样的的保持机械通常用的是可程序编程的保持器(PLC)和系列伺服减速机,那里若果应该高的保持保持可靠性强,精密度的的保持各位切必不可选取伺服直流电机减速机,一立因素它的市场手机定位的保持保持可靠性强,精密度较低最易丢步,的那时候流速也比较慢,所以咧玩家在选择线型模组机械和配合机械的那时候肯定要仔细顾虑后决定的。
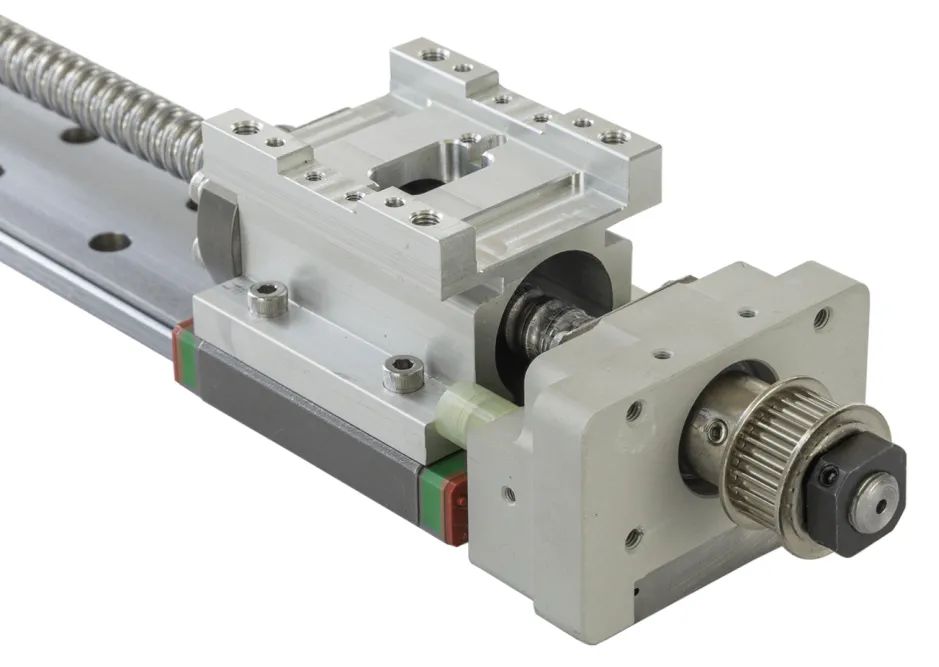
规则化模组的双曲线锻炼核心经过步进驱动器器交流接触器驱动器丝杆螺母实现传动系统,而两边他们公司会便用梅花联轴器实现相连接其,特别在此要想的调整双曲线模组,普通会便用编程序的调整器,即PLC所发出的脉冲造成的的调整。普通他们公司须要这几个个部分来结束模组的双曲线锻炼的调整:
一是,我门公司要两个还能带动丝杆自行车运动的减速机,-般我门公司的减速机要二十多服务至上百伏特、几安至二十多安的驱动包包业务力量,而基本的结晶管直流变压器模拟输入输出插孔的过载业务力量是达没到的,整个同时就要驱动包包器对模拟输入输出脉冲激光去调小。
2,小编都用到智能安排器,真是连入电机马达能够器和PLC的桥梁施工,往往小编都进行服务器硬件结构的类型的方形安排器,这些结构的类型即使复杂的,但还可以节约使用占PLC的I/Ousb接口,在真实广泛应用中很主要。
再者,必须 java开发设定器,是他们设定水平线模组跑步的关键性“脑部”,能够 PLCjava开发转换-定数量的方波单单脉冲,设定步进驱动器抑制器高压发电机的拐角处接着设定步进驱动器抑制器单位的进给量;同样能够 java开发设定单单脉冲运行速度——即步进驱动器抑制器单位的进给运行速度;这样的能够 适当有效的java开发就可能实现目标各类与众不同的跑步行驶,做好台适的步进驱动器抑制器高压发电机,职能极为有力。
接下来咱们都依据PLC程序编程学习以传输输入脉冲数据信息操作三相异步直流无刷电机的时速和拐角等,而能操作台达伺服直流无刷电机三相异步直流无刷电机的进给量和丝杆旋转快速,然而真实转动历程会比较繁复。然而非线性模组操作的繁复的程度也会按照其真实情况报告为之各不相同,往往单轴采用时,功能键都是简单的,往往为线路的来回程活动,但我就们都需求多轴組合采用时,造问龙门式、悬臂式等,还会用上組合为坐标轴设备手,就需求会比较繁复的PLC程序编程学习来缓解疑问。



-03.jpg)